Retrouver la route du col du Grand-Saint-Bernard
Le 19 mai prochain, les coureurs du Giro d'Italia partiront de Borgofranco d'Ivrea (I) pour rallier Crans Montana (VS) au terme d'une étape de 207 km qui les verra gravir les cols du Grand-Saint-Bernard (2469 m) et de la Croix de Cœur (2173 m). Le passage des cyclistes nécessite une ouverture anticipée (de l'ordre de 2 à 3 semaines) de ces routes, habituellement encore recouvertes d'une épaisse couche de neige à cette période de l'année. Avant de pouvoir dégager cet axe, la première difficulté consiste tout d'abord à retrouver sa trace. Pour en savoir plus sur les opérations de déneigement du Col du Grand St-Bernard et les techniques mises en œuvre pour retrouver la route, voici un article que TRACÉS avait consacré à ce sujet en 2009.












En hiver, le col alpin du Grand-Saint-Bernard se couvre d’un épais manteau blanc. Cette transversale alpine n’est dès lors plus accessible qu’aux randonneurs circulant à pied, à ski ou en raquettes. Chaque printemps, les responsables du Service des routes et des cours d’eau (SRCE) du Canton du Valais procèdent au déneigement du tronçon, assurant ainsi sa réouverture à la fin mai. Il s’agit alors de retrouver, enfoui sous des mètres de neige, le tracé exact de cette route de montagne qui relie, côté suisse, Bourg-Saint-Bernard (1930m) à l’Hospice du Grand-Saint-Bernard (2470m). Deux méthodes de piquetage des bords de la route – par implantation polaire au théodolite ou, plus récemment, grâce aux satellites de GPS et de Glonass – permettent depuis près de dix ans le guidage des engins de déneigement.
Article paru en novembre 2009, auteurs: Yves Molk et Christian Hagin
La route du col du Grand-Saint-Bernard (E27, ou H21 pour la Suisse) se trouve au cœur des Alpes, entre la Suisse et l’Italie. Elle relie plus précisément le canton du Valais et la vallée d’Entremont à la Région autonome du Val-d’Aoste et sa vallée, soit Martigny à Aoste (fig. 5). Le tronçon de route déneigé sur le territoire suisse fait six kilomètres. Son tracé actuel date de 1905 et affiche par endroits une déclivité de 9%. Cette portion n’est praticable qu’à la belle saison, une fois le déneigement mécanique terminé et quand les avalanches tardives ne mettent plus en danger les usagers. Depuis 1964, la liaison transalpine praticable à l’année est assurée par le tunnel routier (5 850 m de long).
Nécessités du déneigement mécanique
C’est une convention italo-suisse qui a fixé les dates d’ouverture de la route du col du 1er juin au 15 octobre de chaque année. L’impact touristique et économique de cette route est
énorme, et ceci dès les premiers jours de son ouverture: les usagers de la première heure apprécient le contraste entre le printemps fleuri et verdoyant de la plaine du Rhône et l’hi- ver encore très présent à 2 500 m. L’hospice, ses chanoines, son musée et ses chiens contribuent à cet engouement. D’où l’importance de l’opération printanière de déneigement permettant la réouverture de la route à la circulation automobile.
Ancien moyen de repérage des bords de route et procédé de déneigement
Anciennement, le repérage de la route était réalisé à l’aide de poteaux en bois de 4m de haut, installés à l’automne. Nombre de ces piquets étant emportés par les avalanches, on devait souvent procéder à des sondages manuels ou au creusage à la pelle de tranchées pour retrouver la route. Cela impliquait l’engagement de plusieurs ouvriers des villages voisins qui trouvaient là un réel gagne-pain printanier. Dans les cas où le déneigement dévie hors tracé, l’engagement d’une pelle rétro est le seul moyen de correction, la fraiseuse ne pouvant pas reprendre sa marche au sommet d’une mini falaise de neige pouvant atteindre 7m. Afin de tenir le délai d’ouverture, on devait alors reporter sur les samedis, dimanches et autres jours de fêtes religieuses le travail dû aux complications de repérage.
Personnel, moyens mécaniques et logistique
Avec l’avènement des moyens mécaniques, le nombre d’acteurs œuvrant au déneigement printanier s’est considérablement réduit. L’équipe compte aujourd’hui, quelle que soit la méthode d’implantation employée, un voyer d’arrondissement responsable de l’ensemble, deux cantonniers, deux machinistes (fraiseuse et dameuse), un chargé de sécurité avalanches et deux à trois géomètres et aides de terrain.
Les engins (fig. 2 et 3) ne travaillent jamais au même endroit. Sur mandat du SRCE, la dameuse des pistes de ski des Remontées mécaniques du Super Saint-Bernard, avec sa lame de presque 5m, s’occupe à dégager essentiellement dans les grandes pentes, poussant la neige en aval et ce jusqu’à une hauteur d’environ un mètre au-dessus de la chaussée. La fraiseuse parcourt la totalité du tronçon, par étapes de 100 à 200m, abaissant la couche neigeuse de 1,20 m de haut par 2 m de large à chaque passage. Ce sont les passages successifs sur ces étapes qui amènent l’engin jusqu’au niveau de la chaussée. Pour des raisons pratiques et de sécurité, la fraiseuse commence toujours en amont de la route, en suivant soit le bord laissé par la dameuse, soit les piquets des géomètres (fig. 4). Cette machine de 600 chevaux, propriété des Transports Martigny Régions, travaille également sur mandat du SRCE.
Pour compléter cet équipement, les cantonniers disposent d’un Unimog, équipé d’une lame à neige pour les dégagements ponctuels qui surviennent suite à l’effondrement des parois dû au soleil ou à de petites coulées tardives.
Chaque année, 20 jours ouvrables sont nécessaires pour mener à bien cette tâche. Celle-ci est précédée d’une visite attentive des lieux et, au besoin, de minages préventifs des parois neigeuses avec l’aide de l’hélicoptère afin de déclencher des avalanches. Notons que la méthode actuelle de piquetage pour le guidage des engins représente, du point de vue des finances cantonales, une économie en temps, énergie et moyens d’environ 30%.
Enfin, avant l’ouverture définitive au trafic, on procède à la repose de la signalisation et des glissières démontés pour l’hiver. Pendant près de trois semaines, un suivi journalier permet des salages de la glace formée durant les nuits encore hivernales à cette altitude suite à la fonte des neiges durant la journée. Notons que sur le versant italien, le travail de déneigement se fait en parallèle et en sondant les bords de la route. Le versant sud de la montagne est bien ensoleillé mais compte tout de même de dangereuses zones d’avalanches.
Nouvelles méthodes de piquetage
Peu importe la méthode employée pour le piquetage des bords de route, une précision de ±5cm est requise: il s’agit de pouvoir réimplanter le milieu de chaque ligne blanche bordant la chaussée.
Un relevé du milieu des deux lignes existantes a donc été effectué en période estivale. Ce dernier n’a pas été réalisé en continu, mais plutôt par le choix de points caractéristiques: début et fin d’alignement, début, point intermédiaire et fin de courbes, ou encore tout point singulier pouvant entraver la bonne marche des engins lors du déneigement. Un premier relevé concernait les zones recouvertes au mois de mai soit par d’importantes couches de neige (7 à 8 m) qui cachent tout repère naturel ou artificiel, soit par des avalanches susceptibles de casser les repères traditionnels en bois. Une seconde étape de relevé a permis de compléter les zones manquantes. On dispose ainsi, tout le long du tronçon, d’un repérage des deux bords de la route et de tous les points caractéristiques.
Pour des raisons de mise en œuvre des machines de déneigement, il a été retenu lors de l’implantation hivernale de piqueter uniquement les bords en amont de la route et les zones où tout autre moyen de repérage s’avère impossible. Ces points sont alors matérialisés, sur la neige, par
une baguette en bois et une trace de peinture de chantier. Ponctuellement, quelques points en aval sont implantés pour situer plus expressément rochers, murs, ponts ou virages en épingle. Une tâche dans laquelle le relevé exhaustif de la route joue un rôle décisif.
Relevé et implantation à l’aide du théodolite
En 2000, suite à la demande de piquetage printanier des bords de route, la toute première démarche a consisté à contacter le cantonnier qui serait chargé de coordonner les opérations de déneigement, lui seul connaissant les endroits potentiellement libres de neige au mois de mai suivant. En effet, pour la méthode par implantation polaire au théodolite avec des stations libres, il fallait disposer de points fixes libres de neige autant à la station qu’aux orientations.
Ces visites des lieux ont permis de s’assurer que la hauteur de neige ne serait pas, lors de l’implantation, un obstacle à l’observation des prismes situés en zones de forte dénivellation ou à grande distance. Les points retenus étaient tous des rochers faisant office de promontoires. La matérialisation des points fixes s’est faite par la pose de grosses chevilles en laiton, complétée par de plus petites pour le repérage rapproché. Le relevé de l’existant n’a pas posé de problème majeur, exception faite de la météo fort capricieuse à ces altitudes et en fond de vallée. On a également profité de cette opération pour tester les communications radio, indispensables au moment de l’implantation, tout en sachant que les opérateurs et les aides travailleraient malgré tout à vue.
Implantation printanière des bords amont de la route
Début mai 2001, prête pour le premier piquetage, l’équipe des géomètres attendait l’appel des cantonniers. Le début de l’opération était alors tributaire de la hauteur de neige et de la météo, des risques d’avalanche et de brouillard. En toutes circonstances, un chargé de sécurité mandaté par le canton contrôlait les équipements de détection de victimes d’avalanches (DVA) et accompagnait les géomètres sur les zones d’implantation situées bien en avant des engins de déneigement. Les premières années, les déplacements se firent uniquement à pied et en raquettes (les skis empêchaient toute mobilité aux points implantés et représentaient une gène importante aux stations). Par la suite, afin d’augmenter la productivité, une dameuse de piste a été mise à disposition pour les déplacements entre stations (fig. 6 et 7).
Testée lors des premiers relevés, la communication radio entre opérateurs et aides s’est avérée efficace. Mais les déplacements ont été et restent difficiles, principalement à cause de la pente des versants neigeux et de sa couche de
surface souvent gelée. Une autre difficulté tenait à l’importante différence de topographie entre le terrain en été et la hauteur inégale de la couverture neigeuse (fig 10 et 11). A certains endroits, il a été nécessaire d’implanter des points intermédiaires puis de les déplacer (par exemple marquer le bord aval puis le reporter en amont), ou encore de rallonger le support du prisme jusqu’à 5 m afin de pouvoir viser.
Précision du relevé et de l’implantation
Lors du relevé, on avait mesuré la largeur de la chaussée entre les deux lignes blanches. La précision attendue lors de l’implantation étant de l’ordre du centimètre, le calage et la verticalité du théodolite et du prisme doivent être soignés. Les stations avaient été choisies de façon à pouvoir les replacer dans les conditions hivernales (hauteur de neige aux abords, mise en place et stabilité du trépied). A ce titre, et par précaution, plusieurs points d’orientation avaient été mesurés. La précision des points à implanter a fait l’objet de soins particuliers, mais
on s’est heurté aux difficultés mentionnées plus haut, encore accentuées par le froid ou le soleil intense, le vent violent et la glace. Néanmoins, grâce à la rigueur de chacun, la ligne blanche a toujours été retrouvée lors du dernier passage de la fraiseuse. La chance aidant, les chutes de neige ou les avalanches tardives n’ont jamais enseveli le piquetage implanté.
Avantages et inconvénients de la méthode polaire
La méthode polaire s’est montrée parfaitement adaptée et a fait ses preuves durant sept ans. Son avantage principal était de ne pas avoir à effectuer de calcul entre le relevé et l’implantation: étant basée sur des coordonnées polaires (angles et distances) et non nationales ou locales, les valeurs de l’un servaient à l’autre. Son inconvénient majeur était le nombre des personnes engagées – entre trois ou quatre selon l’éloignement du lieu d’implantation – surtout employées au transport des instruments: théodolite, prisme, cane, rallonge, trépied et baguettes de marquage.
Implantation avec les satellites
Les trois contraintes principales de l’implantation avec le théodolite sont la mise en place de l’appareil (stationnement, points d’orientation libre de neige, éloignement entre l’opérateur et l’équipe d’implantation), la vision directe indispensable entre l’opérateur et l’équipe d’implantation (pas d’obstacles topographiques ou de brouillard), ainsi que le type d’implantation (ponctuelle).
Au vu du développement des mesures satellitaires durant ces dernières années, il est clairement apparu que la solution GPS – ou GNSS1 – pourrait permettre de s’affranchir de ces contraintes et remplir les conditions nécessaires à l’ouverture des cols alpins. Elle a donc été utilisée au printemps 2009.
Méthodes de positionnement
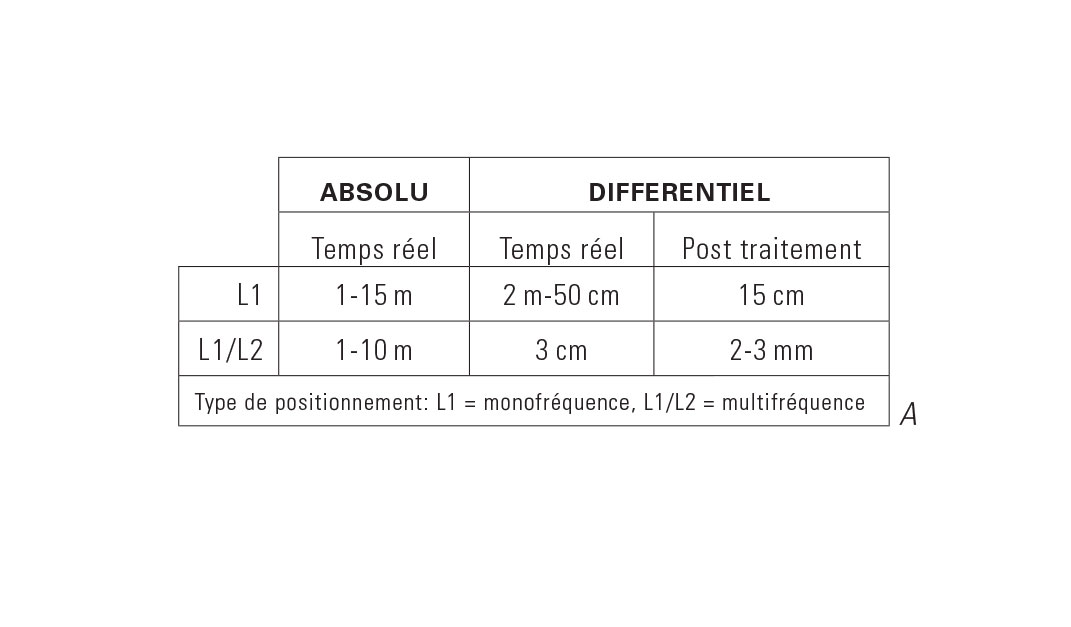
Le marché des systèmes GNSS compte deux gammes de produits: les systèmes dit «low-cost», mono-fréquence (de quelques centaines à quelques milliers de francs) et les systèmes dit bi-fréquences, multifréquence ou géodésiques (plus de 25 000 francs).
La précision du positionnement est donc fonction du type de système et de la méthode d’utilisation. Ces méthodes peuvent être divisées en positionnement absolu et différentiel, avec pour principales différences la précision et la fiabilité obtenues. Un positionnement absolu repose sur des signaux bruts provenant directement de satellites. Par contre, un positionnement différentiel permet de corriger l’imprécision du mode absolu à l’aide d’un système GNSS de référence rattaché à un point connu. Le tableau A offre une synthèse des précisions que l’on peut obtenir selon la méthode et le type d’appareil utilisé. En ce qui concerne l’ouverture des cols alpins, la précision souhaitée est la largeur de la ligne blanche. Le mode différentiel en temps réel en utilisant des systèmes GNSS multifréquence – dit positionnement «RTK» (Real Time Kinematic) – est ainsi privilégié.
Le principe général propre à cette méthode est de palier aux imprécisions volontaires ou non des fournisseurs GNSS par la diffusion de correction en temps réel aux utilisateurs GNSS. Ces corrections sont faites à partir d’un GPS (GPS + GLONASS) se trouvant sur un point connu en coordonnées et qui détermine la différence entre les informations reçues des satellites et sa position réelle. Ces corrections sont envoyées aux utilisateurs par modem radio, GSM, GPRS ou Internet. La station GPS de référence peut être un GPS physique placé sur un point connu ou encore une station « virtuelle » pro- venant d’un service composé de plusieurs stations comme, par exemple, le service SWIPOS de Swisstopo (Office fédéral de Topographie).
Système mis en place au Grand-Saint-Bernard
Les conditions locales particulières de la route du Grand- Saint-Bernard ont conditionné l’architecture du système mis en place. La zone n’est pas couverte par le réseau GPRS et les montagnes environnantes limitent le nombre de satel- lites à disposition, si bien que l’utilisation des corrections SWIPOS via GPRS s’avère impossible. Il faut dès lors maxi- miser le nombre de satellites utilisables dans cette zone. La solution avec un récepteur GPS comme station de référence s’est donc imposée. Cette solution présente l’avantage de pouvoir installer la station sur n’importe quel point connu le long de la route. Les corrections seront ensuite émises au GPS « mobile » par radio modem (fig. 8 et 9).
Pour pouvoir implanter avec précision les bords de la route (ligne blanche côté amont), il fallait identifier de tels éléments de référence dans un système de projection absolu comme celui de projection suisse (CH-03 ou MN95). Les bords de route ont ainsi été mesurés à partir de points fixes tirés de la mensuration officielle situés le long du tronçon.
Ces mesures GPS, effectuées à pied, ont permis une modé- lisation 3D des bords de la route (Y, X, H). La prise de mesures est effectuée à la vitesse du pas, en une journée. La route est ainsi connue des piqueteurs; ses coordonnées peuvent être utilisées pour l’implantation. Lors de ces mesures, plusieurs points fixes ont été mesurés afin de les utiliser pour placer la station de référence en hiver. Ces points ont à nouveau été choisis avec soin à des endroits (soufflés et protégés) peu recouverts de neige. Un minimum de deux points fixes est nécessaire pour couvrir la zone. Etant donné que ces points sont connus en terme de coordonnées, il est aisé de les rechercher d’une station GPS à l’autre, même si la position actuelle de ces points devait être recouverte de neige. Le tra- vail de mesures de la route ainsi réalisé sert de base pour les années à venir. Seuls des compléments seront nécessaires en cas de travaux et de corrections de tracé de la route.
Piquetage par méthode satellite
Comme on l’a vu, l’opérateur GPS est équipé d’un récep- teur GNSS (GPS/GLONASS) qui reçoit les corrections de la station de référence via radio modem. L’opérateur visualise sa position en temps réel sur un portable équipé pour le terrain («touchscreen», étanche, robuste). Comme la route modélisée en 3D est affichée en fond de plan dans le programme, il est facile de l’implanter précisément. En suivant cette métho- de, n’importe quel point de bord de route peut être implanté, et la hauteur de neige relative déterminée. De manière générale, on marque un point tous les 10 à 20m sur les tracés rectilignes et tous les trois à cinq mètres (voire moins) dans les zones dangereuses et les virages. Pour les ponts, les deux bords de la chaussée sont piquetés. La méthode de piquetage est rapide: en tenant compte des conditions locales et du temps de déplacement avec la dameuse, on implante en moyenne 25 points à l’heure.
Avancées techniques, perspectives pour l’avenir
L’ancien système de repérage avait fait ses preuves et a permis de répondre aux attentes. Il fut un excellent test pour
la mise en œuvre des nouvelles technologies d’implantation. Pour les prochaines années, une meilleure couverture radio ou téléphonique permettra encore de réduire le temps des travaux d’implantation.
L’installation dans les engins de capteurs GPS n’est pas, pour l’heure, à l’ordre du jour tant pour les raisons évoquées ci-dessus que pour des question de coûts. De plus, il faut rester attentif aux précisions des points implantés au vu des conditions locales. Par contre, de tels équipements sont mis en place sur une cinquantaine de dameuses de diverses sociétés de remontées mécaniques en suisse.
Il est certain que l’équipe des géomètres à encore quelques belles journées de piquetage devant elle et toujours dans un environnement alpin majestueux.
Note
1. Plusieurs pays ont mis en orbite des satellites à des fins de posi- tionnement. Le plus connu est naturellement le système américain, ou GPS. Les Russes, avec GLONASS, ou encore les européens avec GALILEO, pour ne citer qu’eux, ont leur propre système de position- nement global. Les divers constructeurs intègrent dans leur solution la possibilité de capter simultanément les satellites de ces divers systèmes. Ces solutions sont regroupées sous le nom général de Global Navigation Satellite System, ou GNSS. Mais le terme GPS est souvent utilisé pour désigner des systèmes capables de recevoir les signaux GPS et GLONASS.
Yves Molk, géomètre ETS Canton du Valais Service des routes et cours d’eau Services centraux, Géoroutes Rue des Creusets 5, CH – 1950 Sion
Christian Hagin, Ing. géomètre officiel EPF/SIA Geosat SA - Bureau d’ingénieurs et géomètres officiels Route du Manège 59, CH – 1950 Sion
Cet article a été préparé avec la contribution de M. Meinrad Coppey, voyer d’arrondissement.